


Interface編集部
2024年10月号…環境構築手順の補足
★2024年9月4日更新:ステップ②の手順2に記載されているlocal.confの内容に誤りがありました.お詫びして訂正いたします★
●このページで解説すること
本サポート・ページでは,2024年10月号で,開発ホスト(PC)にLinuxビルド環境を構築するときの手順を紹介します.ビルド・システムにはYocto Projectを使用します.開発ホストには,Ubuntu 22.04を使用しました.
●ステップ①…ビルド環境を構築する
▼手順1:事前準備
次のコマンドを実行して,ビルド環境に必要なツールをインストールします.
$ sudo apt-get update
|
pylint3パッケージはUbuntu22.04には存在しないので,次のコマンドでインストールします.
$ pip3 install --user pylint |
▼手順2:開発環境のクローン
任意の場所にディレクトリを作成し,そのディレクトリ内に開発環境をクローンします.次のコマンドを実行します.
$ git clone -b mickledore git://git.yoctoproject.org/poky.git |
▼手順3:セットアップ・スクリプトの実行
次のコマンドを実行します.
$ . poky/oe-init-build-env |
●ステップ②…ラズパイ4向けイメージをビルドしてみる
▼手順1:BSPレイヤの取得
次のコマンドを実行して,ラズベリー・パイ用のBSP(Board Support Package)を取得します.
$ bitbake-layers layerindex-fetch meta-raspberrypi |
▼手順2:ラズベリー・パイ4向けの設定を追加
build/conf/local.confに,次の内容を追記します.
MACHINE = "raspberrypi4-64"DL_DIR = "${TOPDIR}/../downloads"# enable uartENABLE_UART = "1"DISTRO_FEATURES:append = " systemd"VIRTUAL-RUNTIME_init_manager = "systemd"DISTRO_FEATURES_BACKFILL_CONSIDERED = "sysvinit"VIRTUAL-RUNTIME_initscripts = ""# Accept for the synaptics licenseLICENSE_FLAGS_ACCEPTED = "synaptics-killswitch" |
▼手順3:Linuxイメージの構築
次のコマンドを実行して,Linuxイメージを生成します.
$ bitbake core-image-base |
●ステップ③…生成したイメージをmicroSDカードに書き込む
開発ホストにmicroSDカードを接続し,次のコマンドを実行ます.
$ cd tmp/deploy/images/raspberrypi4-64$ sudo bmaptool copy core-image-base-raspberrypi4-64.wic.bz2 /dev/sdX |
sdXには,microSDカードのデバイス名を入れます.デバイス名は環境ごとに異なるので,/devディレクトリで確認してください.
●ステップ④…ラズパイ4にUSB-シリアル変換モジュールを接続する
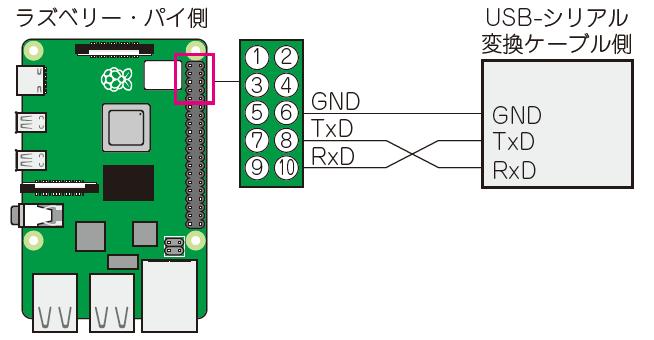
▼手順1…変換モジュールとの接続
USB-シリアル(UART)変換モジュールを用いて,ラズパイ4とPCを接続します.接続は次の通りです.
▼手順2…ターミナル・ソフトウェアの設定
PCにターミナル・ソフトウェアを導入し,ラズパイ4のシリアル・コンソールを表示できるように設定します.
・スピード:115200bps
・データ:8ビット
・パリティ:なし
・ストップビット:1ビット
・フロー制御:なし
●ステップ⑤…ラズパイ4にmicroSDカードを挿入して起動する
書き込みが完了したら,カードをラズベリー・パイ4に挿入して起動します.








ショップへのリンク")

