


Interface編集部

2022年4月号 特集ドローン自律飛行 サポートページ
第1部
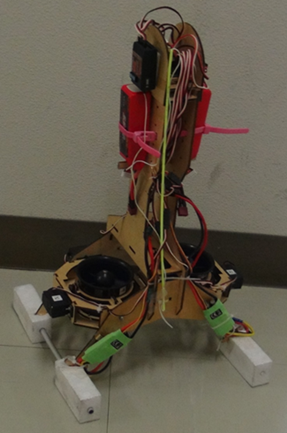
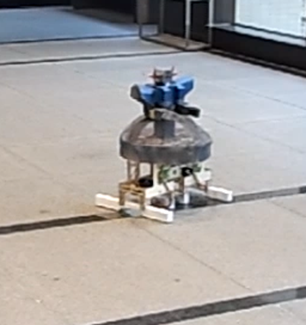
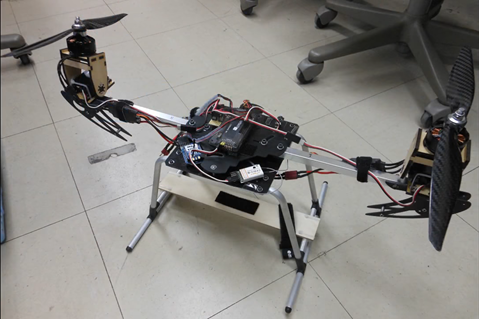
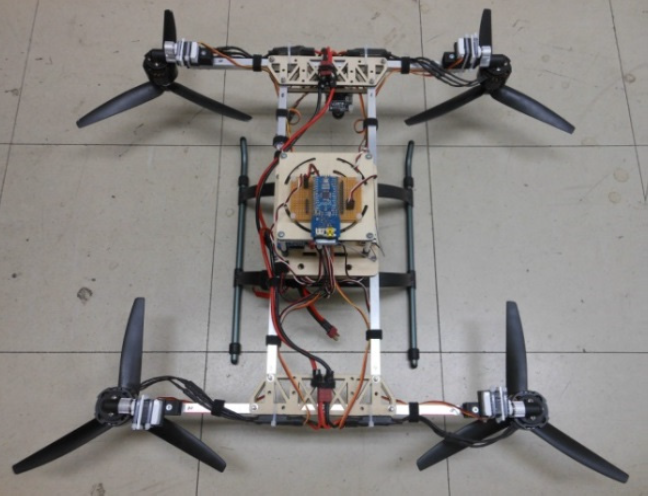
■2章 推力偏向機
推力偏向機など特殊な形状のドローンを動画で紹介します.
特集では,ドローンが飛ぶ基本的な仕組みに加え,動画に登場するドローンから1部のものを紹介しています.
今月号で紹介していないドローンも,今後紹介する予定です.
●筆者がこれまでに飛ばしたドローンを紹介します
紙面では紹介しきれなかった機体の写真も掲載します.







第2部 Python+OpenCVで画像処理 自律飛行に挑戦
室内ドローンTelloとラズパイ(地上局)を使ってカメラ画像による自律飛行に挑戦します.
YouTubeでノーカット動画が見られます(https://youtu.be/EromeEE4aqE)
■2章 環境構築
●ラズベリー・パイ起動用microSDカードの準備方法
PCを使って,microSDカードにラズベリー・パイの起動イメージ(Raspberry Pi OS)を書き込みます.
▲ツールのダウンロード
Raspberry Pi OS – Raspberry Pi から「Download for Windows」をクリックしてツール(Raspbery Pi Imager)をダウンロードします.
ダウンロードしたimager_1.7.1.exeをダブルクリックしてRaspberry Pi Imagerをインストールします.
▲イメージの書き込み
Raspberry Pi Imagerを起動します.
書き込むイメージを選択します(分からない方はRaspberry Pi OS with desktop and recommended softwareを選んでください).
書き込むドライブ(microSDカード)を選択します.ドライブ選択を間違うとPCが起動しなくなるので注意してください.
しばらくすると,書き込みが終了します.
(イメージを書き込んだmicroSDカードをラズベリー・パイに差し込んで,ラズベリー・パイの電源を入れてください)
●SDK資料のダウンロード・サイト
■3章 基本のプログラム
筆者の作ったサンプル・プログラムのダウンロード・サイト(GitHub)
hsgucci404/tello_interface (github.com)
●ラズパイ+Python+OpenCV+DJITelloPy(Telloのライブラリ)でドローン制御
Telloをプログラムから制御する方法は色々あります(モード,ライブラリが複数ある).
記事では,DJITelloPyを使ってPythonプログラムから制御します(SDKモード).
▲豆知識
Telloが応答しなくなったときは,
・Ctrl+cを押してPythonプログラムをkillする
・コマンド・プロンプトのウィンドウを閉じてシェルごとkillする
・Telloを再起動する
などをためしてください.(現状,動画のデコード・ライブラリPyAVの問題でこの現象が発生する場合があるようです)
●3章 色追跡
色追跡のターゲットはオレンジ色がやりやすい

2部おまけ
●ドローンにARコードを読ませて制御することもできます
今回はページ数の関係で掲載できませんでしたが,今後紙面で紹介する予定です.

●ドローンTello の種類
現在,4機種ラインアップされています(国内では3機種が販売されているようです).

●ミッション・パッド
4機種のうちの1つ Tello EDUには,ミッション・パッドが4個付属します.
(2セットあるとID1~ID8をフルに使えてよいそうです)

各パッドの模様に1~8のIDがエンコードされている.
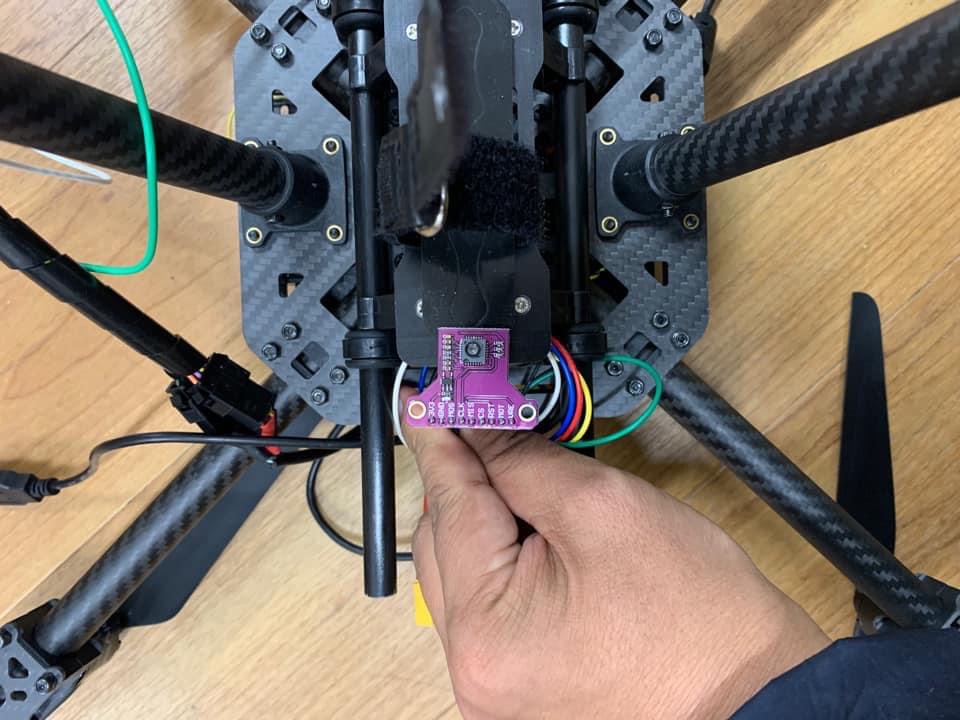
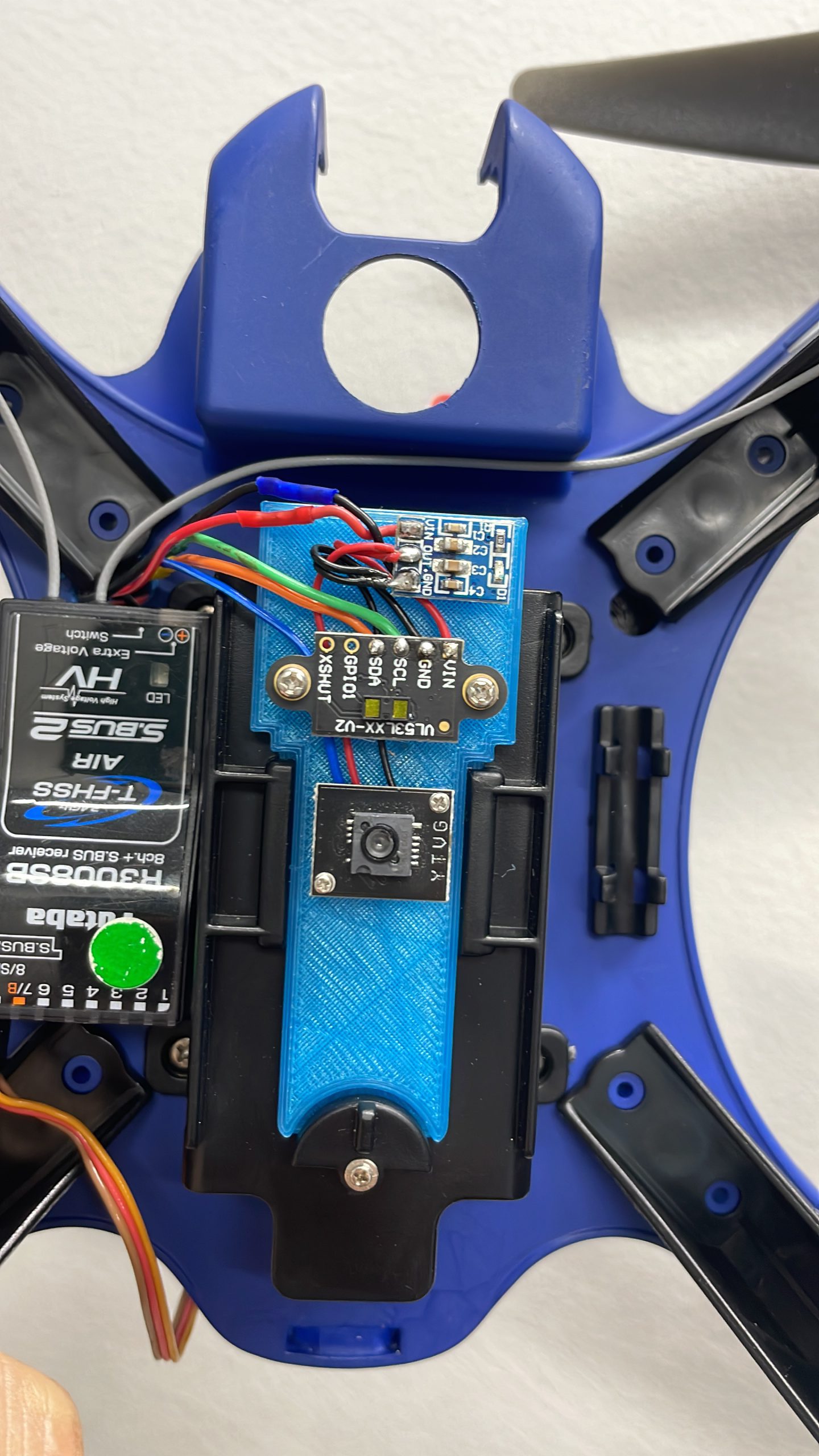
●機体の横流れ防止のため画像系センサによってオプティカル・フローを使うドローンの下面の様子
以下に,いろいろなドローン下面の画像を示します.











2部3章
1:スケルトン・プログラム
2:BGR色変換
3:HSV
4:ラベリング
5:色
2部4章
1:ライントレース
2:顔追跡
2部おまけ章
1:ARカード
2:QRミッション1
3:QRミッション2
4:Donkey Tello
5:Donkey Tello2
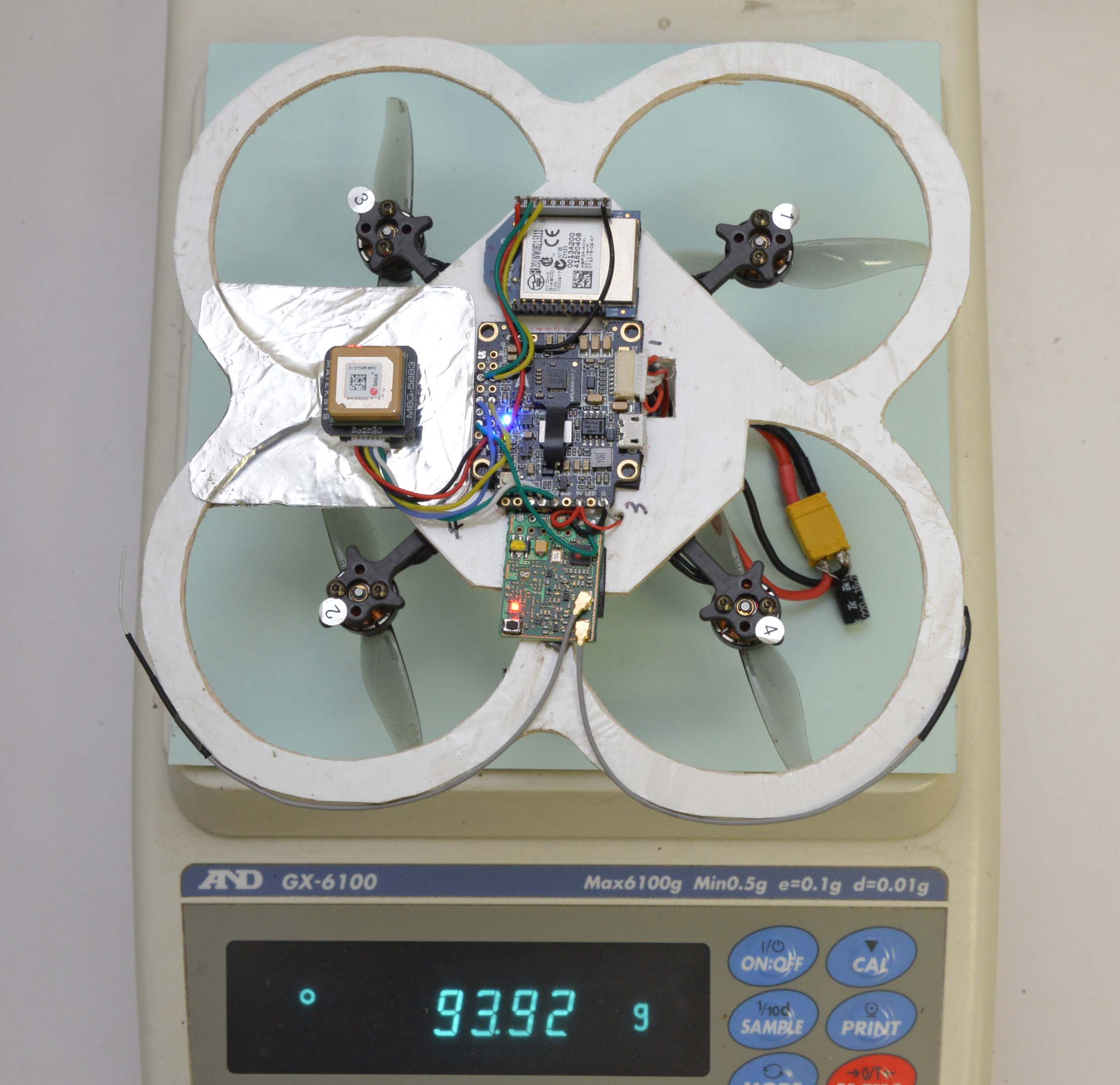
3部 100gドローン作り
筆者の作ったGPS付き100gドローンを紹介します









ショップへのリンク")

