


Interface編集部

検査装置の画像処理
筆者は検査装置のための画像処理(一般にマシンビジョン と呼ばれます)に関わっています.画像処理の目的は,製品のキズや汚れ,異物の混入,寸法計測などの欠陥検査,組み立て装置と連携した部品の位置合わせなどです.装置の目としての役目を担います.
● 画像処理の半分は照明で決まる
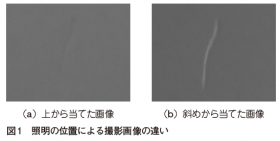
図1の2つの画像をご覧ください.この2つの画像は紙にできた凹み部分を,同じカメラと照明を用い,照明の位置だけを変えて撮影しています.図1(b)の方が凹み部分がよりクッキリと撮影できています.欠陥検出を行う画像処理では,画像のノイズ除去を行い,膨張/収縮処理,2値化処理などの処理を行いますが,処理結果を安定させるには,より高いコントラストで撮影することが重要となります.画像処理用の照明には,被写体の材質や検出する内容に合わせて,リング照明,バー照明,同軸照明,バックライト照明,ドーム照明などの種類があります.画像処理を行うにはまず,どのような照明を用いて,どのようにカメラと照明を配置し撮影するかを検討してから画像処理アルゴリズムの検討を行います.マシンビジョンにとっての照明は,ただ明るく照らす物ではなく,欠陥部分をより鮮明に浮き立たせるものとなります.
● マシンビジョン用カメラの特徴
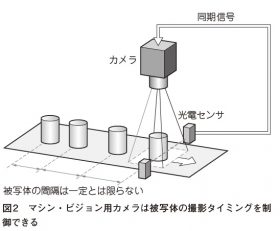
最近のウェブ・カメラでは高解像度の品もあるのに,わざわざマシンビジョン用のカメラを用意するのはなぜでしょう.高いフレーム・レートや,豊富なレンズのラインアップも要因の1つですが,一番の理由は同期撮影にあります.一般的なウェブ・カメラでは,例えば30fpsのカメラであれば,33msごとに1フレームずつ画像を撮影しています.このウェブ・カメラを用いて,ベルトコンベアなどで搬送されている被写体を,カメラの正面を通過したタイミングで撮影したとしても,カメラは一定時間で各フレームの画像を撮影しているため,必ずしも被写体を画像の中心で撮影できません.マシンビジョン用のカメラを使うと,光電センサなどを用いて,被写体の通過タイミングを取得し,カメラへ同期信号を送り,カメラの露光が開始され,1フレームぶんの画像が取得されます(図2).これら一連の処理はハード的に行われ,各フレームごとに撮影タイミングを制御することができ,常に同じ位置で被写体を撮影することが可能となります.
● ディープ・ラーニングを用いた画像検査
従来の検査装置向けの画像処理では,主に電子部品や機械部品などの工業製品が検査対象となっています.これらの検査では,照明条件や撮影タイミングを制御し,同一条件で撮影することが前提となっていました.ディープ・ラーニングが登場したことで,目視検査に頼ることの多かった食品,アパレル製品など形状や色が一定でないもの,模様と欠陥の分類が困難であったものへの取り組みが進んできています.ディープ・ラーニングと言えばPythonですが,マシン・ビジョンではC++かC#になります.この溝が埋まれば,ディープ・ラーニングは画像検査への応用が進むと期待しています.このウェブ・カメラを用いて,ベルトコンベアなどで搬送されている被写体を,カメラの正面を通過したタイミングで撮影したとしても,カメラは一定時間で各フレームの画像を撮影しているため,必ずしも被写体を画像の中心で撮影できません.マシンビジョン用のカメラを使うと,光電センサなどを用いて,被写体の通過タイミングを取得し,カメラへ同期信号を送り,カメラの露光が開始され,1フレームぶんの画像が取得されます(図2).これら一連の処理はハード的に行われ,各フレームごとに撮影タイミングを制御することができ,常に同じ位置で被写体を撮影することが可能となります.
● ディープ・ラーニングを用いた画像検査
従来の検査装置向けの画像処理では,主に電子部品や機械部品などの工業製品が検査対象となっています.これらの検査では,照明条件や撮影タイミングを制御し,同一条件で撮影することが前提となっていました.ディープ・ラーニングが登場したことで,目視検査に頼ることの多かった食品,アパレル製品など形状や色が一定でないもの,模様と欠陥の分類が困難であったものへの取り組みが進んできています.ディープ・ラーニングと言えばPythonですが,マシン・ビジョンではC++かC#になります.この溝が埋まれば,ディープ・ラーニングは画像検査への応用が進むと期待しています.
安川 章(Interface2020年7月号 p.90より転載)








ショップへのリンク")