


Interface編集部

Japan Drone 2023レポート
2023年6/26~28にJapan Drone 2023が開催された.主催者は一般社団法人日本UAS産業振興協議会と株式会社コングレ.
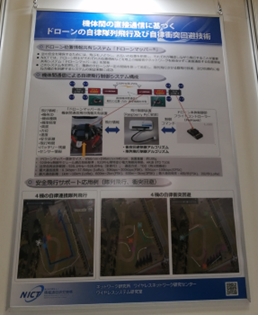
レポート1:「ドローンの自律隊列飛行のための機体間直接通信技術」
情報通信研究機構は,機体間の直接通信に基づくドローンの自律隊列飛行及び自律衝突回避技術に関して自律飛行制御システムの実証実験に成功したことを発表した.
この技術の主な特徴としては以下の2つ.
①ドローン同士がそれぞれの位置情報を直接通信する位置情報共有システム「ドローンマッパー」を開発(ドローン間通信には920MHz帯LPWAを使用)
②飛行制御装置として,ラズベリーパイに独自の衝突回避制御アルゴリズムと隊列飛行制御アルゴリズムを実装
実証実験結果として,ドローン4機の自律連携隊列飛行,4機の自律衝突回避飛行の様子を示した.
国立研究開発法人情報通信研究機構・ワイヤレスネットワーク研究センター
https://www.nict.go.jp/press/2022/04/11-1.html
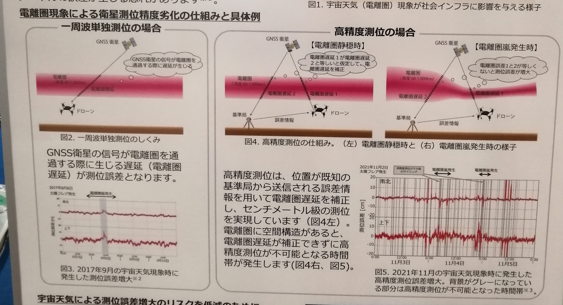
レポート2「ドローンの安心安全な利用に宇宙環境情報の利用を提案」
情報通信研究機構は,ドローン利用時における衛星測位誤差増大のリスク低減のための提案を行った.衛星測位はドローンの位置決定技術に使われている.衛星測位誤差は主に地球高層の電離圏の状態に左右される.一周波単独測位の場合,10年に1度程度の頻度で最大10~20mの誤差が発生する可能性がある.また,高精度測位でも電離圏変動が大きい場合には安定した測位ができない事象が発生する(下グラフ).
この電離圏の乱れは,主に太陽活動が原因となって発生する.このような電離圏など宇宙環境の変動は,地上の天気になぞらえて「宇宙天気」と呼ばれる.同機構ではドローンの安全な利用に,同機構が発している宇宙天気予報の活用を提案した.
国立研究開発法人情報通信研究機構・宇宙環境研究室
https://seg-www.nict.go.jp/









ショップへのリンク")