


Interface編集部
ホール・センサ基板の位置調整 ~書籍「STマイコンで始めるブラシレス・モータ制御」サポート~
書籍「STマイコンで始めるブラシレス・モータ制御」を購入された方が対象です.55~57ページ記事の差し替え版になります.
前章でキットの組み立てが終わりました.ホール・センサ基板は,位置の調整が必要です.「位置調整用プログラム」を用いて,実際にモータを回し,オシロスコープでホール・センサからの波形を見ながら位置を調整します.
図1のようにネジを緩めて調整します.調整が終わったら締めます.
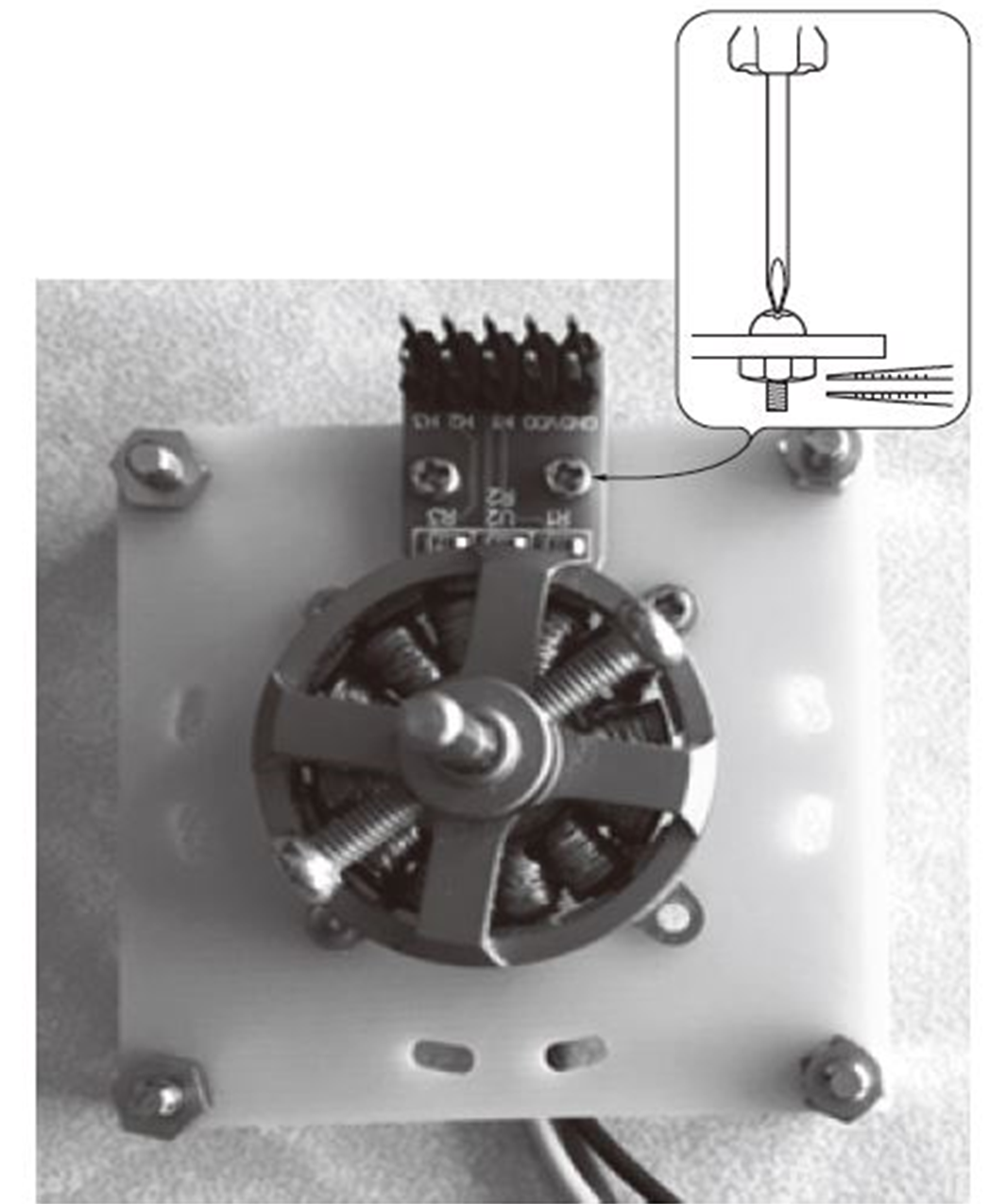
図1 ホール・センサの位置はねじを緩めて調整する
●なぜ位置調整が必要なのか
モータのロータには14枚の磁石が付いています.ロータが今,何°の位置にあるのかをホール・センサを使って読み取ります.この磁石とホール・センサ素子の相対位置を調整することで,安定して波形が読み出せるようになります.
●ステップ1…位置調整用プログラムの書き込み
位置調整プログラムはInterfaceホームページ
https://www.cqpub.co.jp/interface/download/motor.htm
から,Nucleo_F302R8_IHM07_Hall_Adjust_2.binをダウンロードします.
マイコン・ボードNUCLEO-F302R8のジャンパ・ピンJP5[2ページの図1(a)]を,写真1のようにU5V側に設定し,PCにUSBケーブルを用いて接続します.
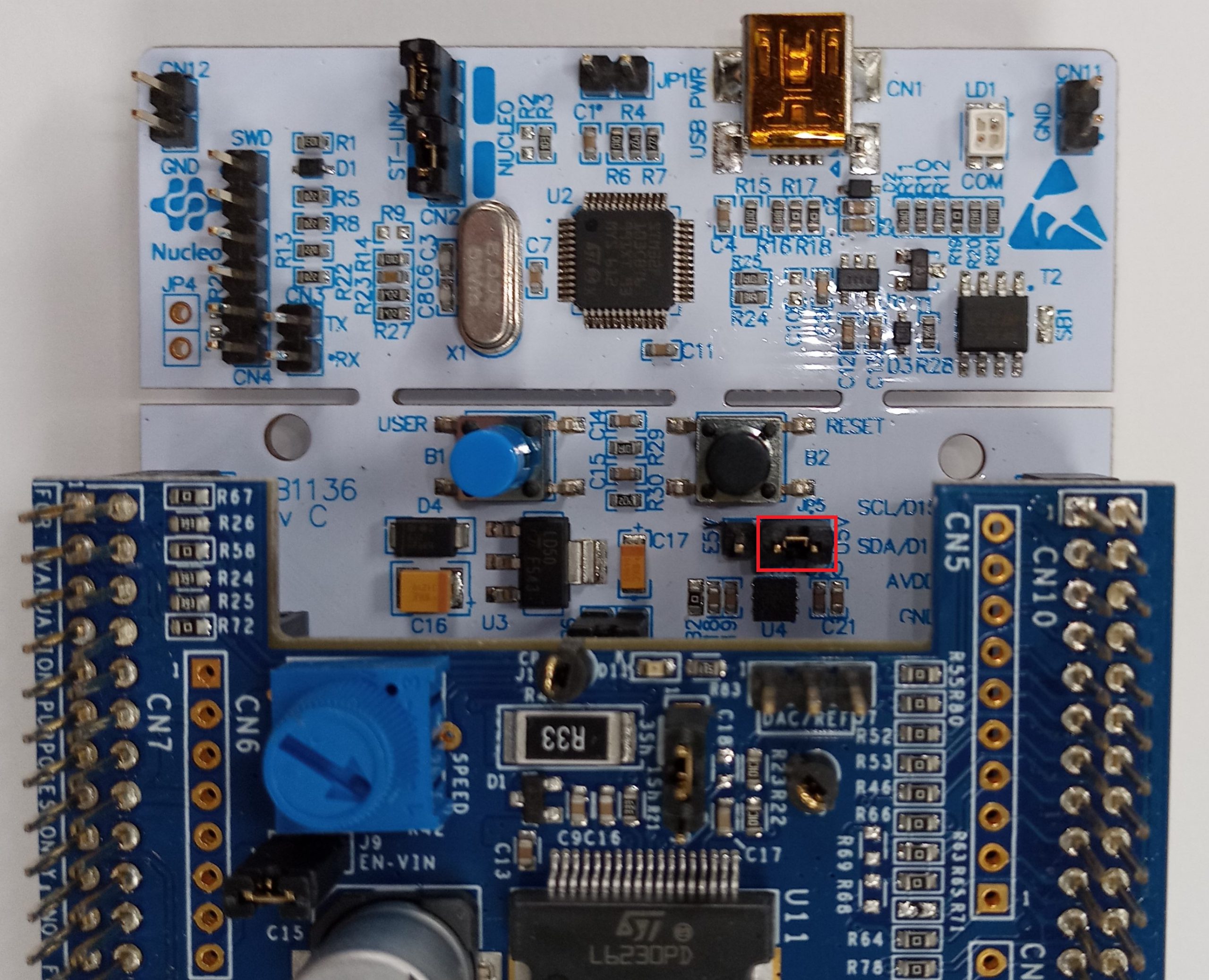
写真1 NUCLEO-F302R8のジャンパ・ピンをUSB給電に設定した様子
図2のように,ドラッグ&ドロップでbinファイルを書き込みます.

図2 ドラッグ&ドロップでNUCLEO-F302R8にbinファイルを書き込める
●ステップ2…モータを回す
USBケーブルを外し,マイコン・ボード上のJP5をE5V側に差します.モータ・ドライバ・ボード上のジャンパが次の状態であることを確認してください.
JP1,JP2はClose,J5,J6は3Sh
54ページ図2に示したボリュームは,最小と最大の中間にします.モータ・ドライバ・ボードのJ1に9~12Vの電源を接続します.
電源投入後,念のためNUCLEO-F302R8上のリセット・ボタン(黒い)を押します.
ボリュームを中点から右に回すと上から見て右に,中点から左に回すと左に回ります.左右回転がスムーズになり,さらにモータの軸を軽くつまんで回転が止まらなければ調整は成功です.
●ステップ3…位置の調整
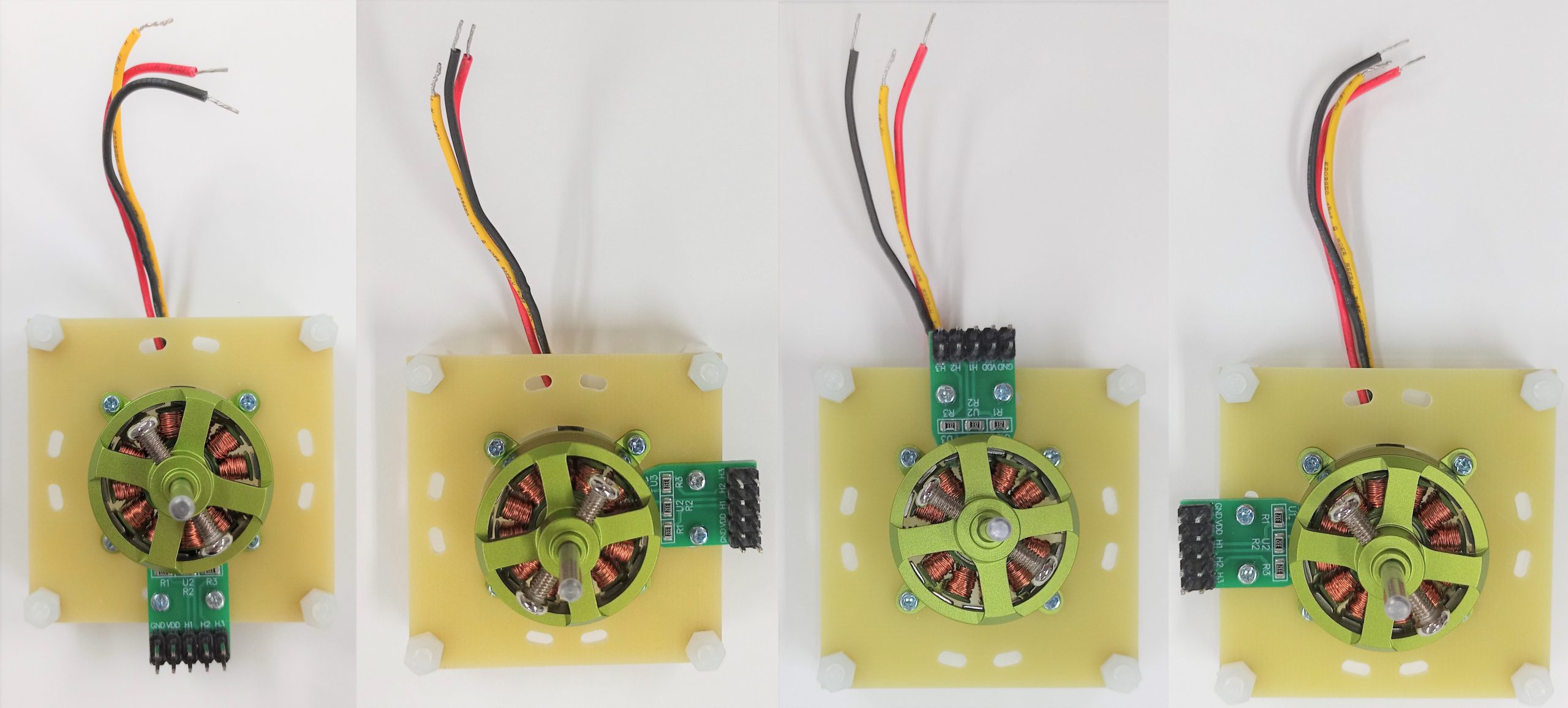
ステップ2の際に,ホール・センサ基板を前後左右に動かしてもらうのですが,それでも上手く回らないときは,写真2のようにセンサの設置位置を変えてみてください.
写真2 磁石とホール・センサICの相対位置を調整するためにはホール・センサ基板の位置を変えることも
左から(a)(b)(c)(d)
(a)最初はここで前後左右に調整
(b)(a)でダメなとき
(c)(b)でダメなとき
(d)(c)でダメなとき
●波形はモータ・ドライバ基板の端子から観測する
図3にモータ・ドライバ基板の端子名を示します.ホール・センサの位置調整時,これらの端子にプローブを当てます.
波形観測は,アナログ出力のDACピンとベクトル制御モニタ・ピンおよびPWM U,PWM V,PWM Wピンで観測します.
調整後のDACピンの波形を図4に示します.調整がうまくいけばこのようなSPMW(空間ベクトル駆動)の変調になります.

図3 ホール・センサ基板の設置が正しくできているかを波形で確かめる際のピン
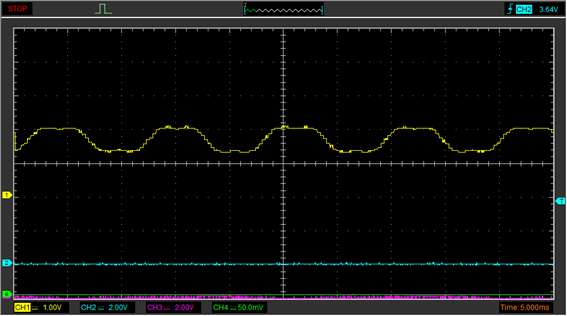
図4 Nucleo_F302R8_IHM07_Hall_Adjust_2.binを用いて調整後のDACピン波形(1V/div,5ms/div)
以上で調整は終わりです.位置調整が上手くいっていれば,以下の各々のプログラムでもキチンと動きます.言い換えれば,プログラムごとにホール・センサ基板の位置を調整する必要は無いです.
本書に登場するプログラムごとの波形
参考までに,46ページ表1に掲載したプログラムごとの動作波形を示します.
●Nucleo_Hall_BLDC_rpm_2
矩形波駆動であり,PWM変調ではないので,直接,PWM U,PWM V,PWM Wピンをモニタします.調整ができていれば図5のように観測できます.
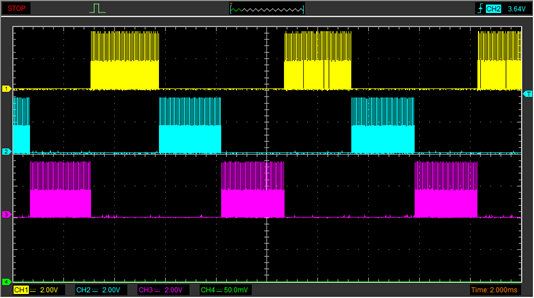
図5 Nucleo_Hall_BLDC_rpm_2による矩形波駆動(2V/div,2ms/div)
●Nucleo_sinwt_BLDC_
数百rpmで確認しています(図6).正弦波変調を浮動小数点計算で行っていますから,プログラムへの負担が大きいです.従って1000rpm以上では波形が滑らかでなくギザギザになります.
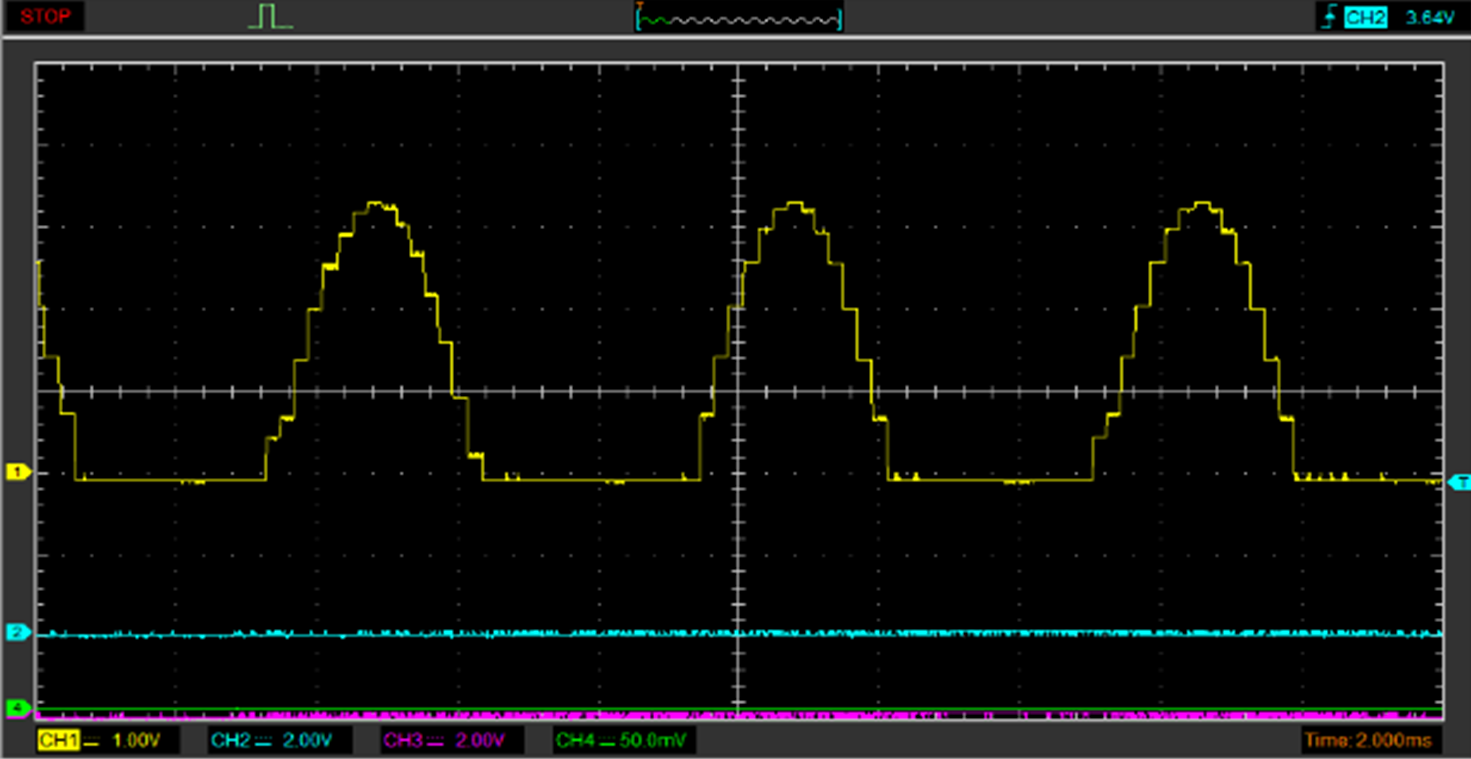
図6 算術演算正弦波のPWM変調波形(1V/div,2ms/div)
●Nucleo_Z_SIN_hf_BLDC
波形を観測できます(図7).z変換IIRフィルタで正弦波計算をします.マイコンへの計算負荷が軽減されますので約2000rpm前後で正弦波変調波形を確認します.
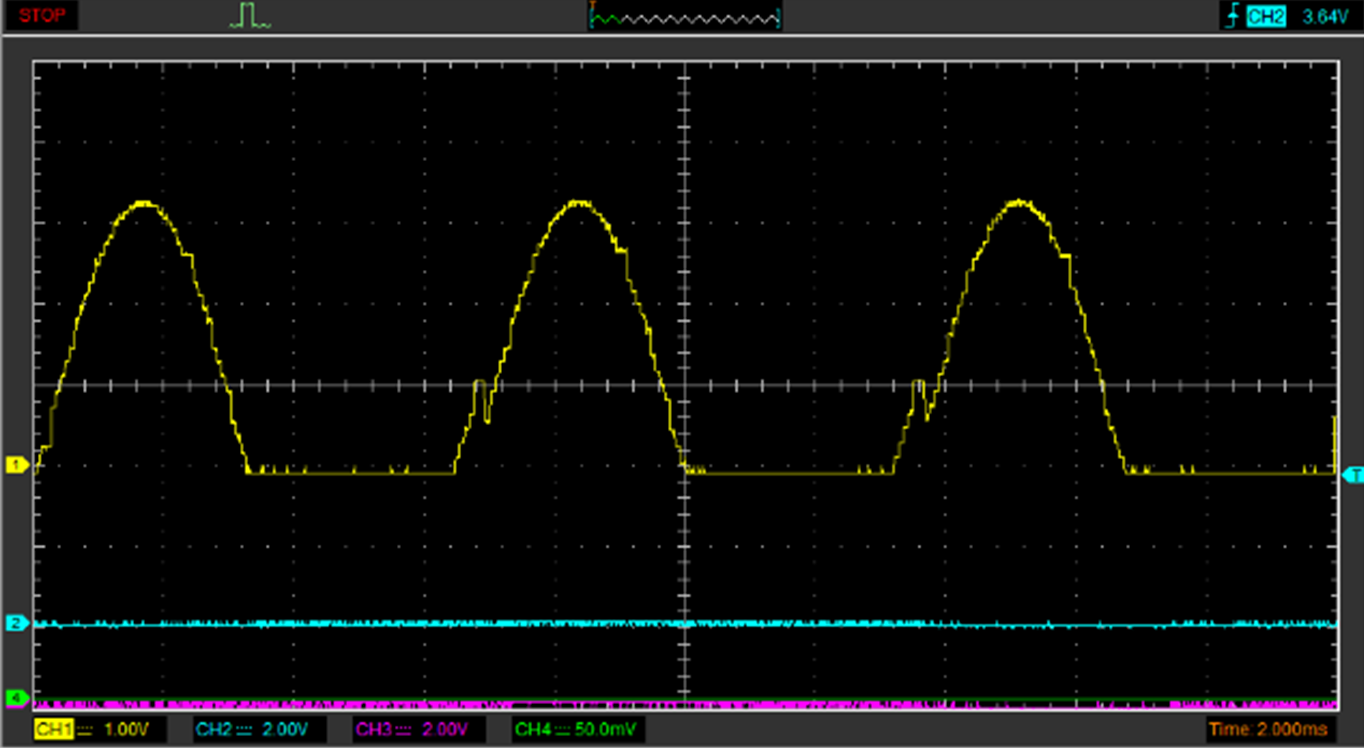
図7 z変換IIRフィルタの正弦波変調波形(1V/div,2ms/div)
●Vector_sin_drive_F302R8_2
U相PWM変調波形です(図8).図3に示すDACピンで観測できます.ベクトル制御モニタは図3のベクトル制御モニタ・ピンにもプローブを当てます.するとボリュームで回転数を上げ,正弦波駆動からベクトル制御に移行する際に“H”になります.
このベクトル制御モニタ・ピンが“H”になったとき,正弦波状の波形が確認できればホール・センサの位置は良好です.図8は正弦波とは言えない微妙な波形になっていますが,これはmbedでの制約でPWMに同期しての割り込み電流読み込みがうまく行えていないのが原因です.
●Vector_SVPWM_drive_F302R8
図9がU相PWM変調波形と,ベクトル制御モニタ波形です.DACピンとベクトル制御モニタ・ピンを利用します.ベクトル制御に移行したかどうかは,ベクトル制御モニタ・ピンが“H”になることによって確認できます.このベクトル制御モニタ・ピンが“H”になり,図9の台形が確認できればホール・センサの位置は良好です.
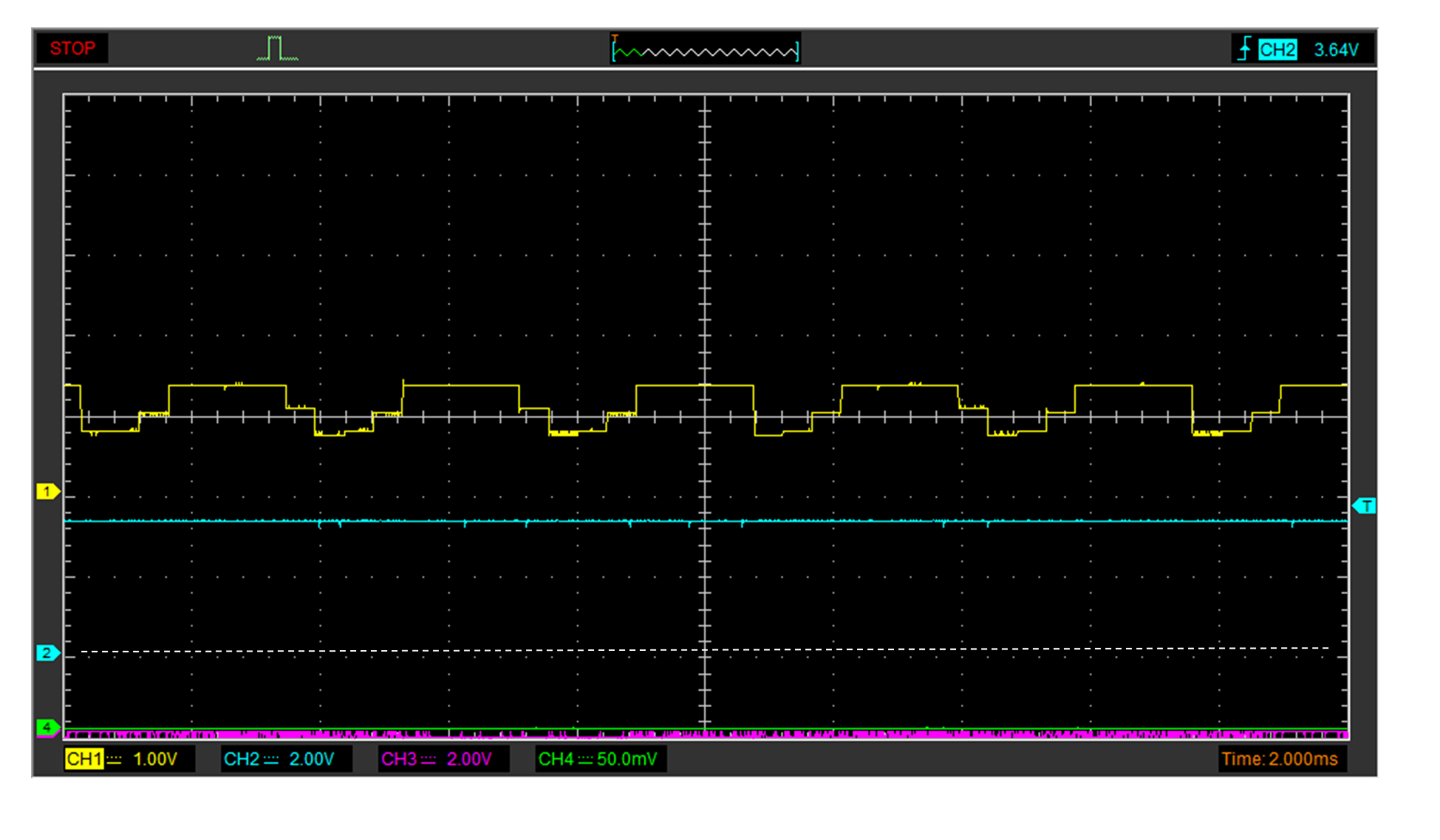
図9 Vector_SVPWM_drive_F302R8_2のU相PWM変調波形(1V/div,2ms/div)
●Nucleo_Hall_rect_sin
ボリュームを電源投入前に中間位置にしておきます.ボリュームを回すことで正転/逆転を操作できます.正弦波の生成にはz変換IIRフィルタを利用しています.
3500rpm以下は矩形波駆動で,3500rpm以上で正弦波駆動に移行します.オシロスコープを使ってDACピンを観測し,図10のように滑らかな正弦波が観測できればホール・センサ基板の位置は良好です.

図10 Nucleo_Hall_rect_sinのU相PWM変調波形(1V/div,5ms/div)
●Nucleo_Hall_rect_sin_vector
ボリュームにてCW/CCW(正転/逆転)を操作できる矩形波→正弦波→ベクトル制御プログラムです.ボリュームは電源投入前に中間位置にしておきます.
1000rpm以下は矩形波駆動で,1000rpm以上で正弦波駆動に移行し,さらに条件が整えばベクトル制御に移行します.
ベクトル制御に移行したかどうかは,ベクトル制御モニタ・ピンが“H”になることによって確認できます.DACピンにおいて図11のようなSVPWM(空間ベクトル駆動)波形が確認できれば,ホール・センサ基板の位置は良好です.
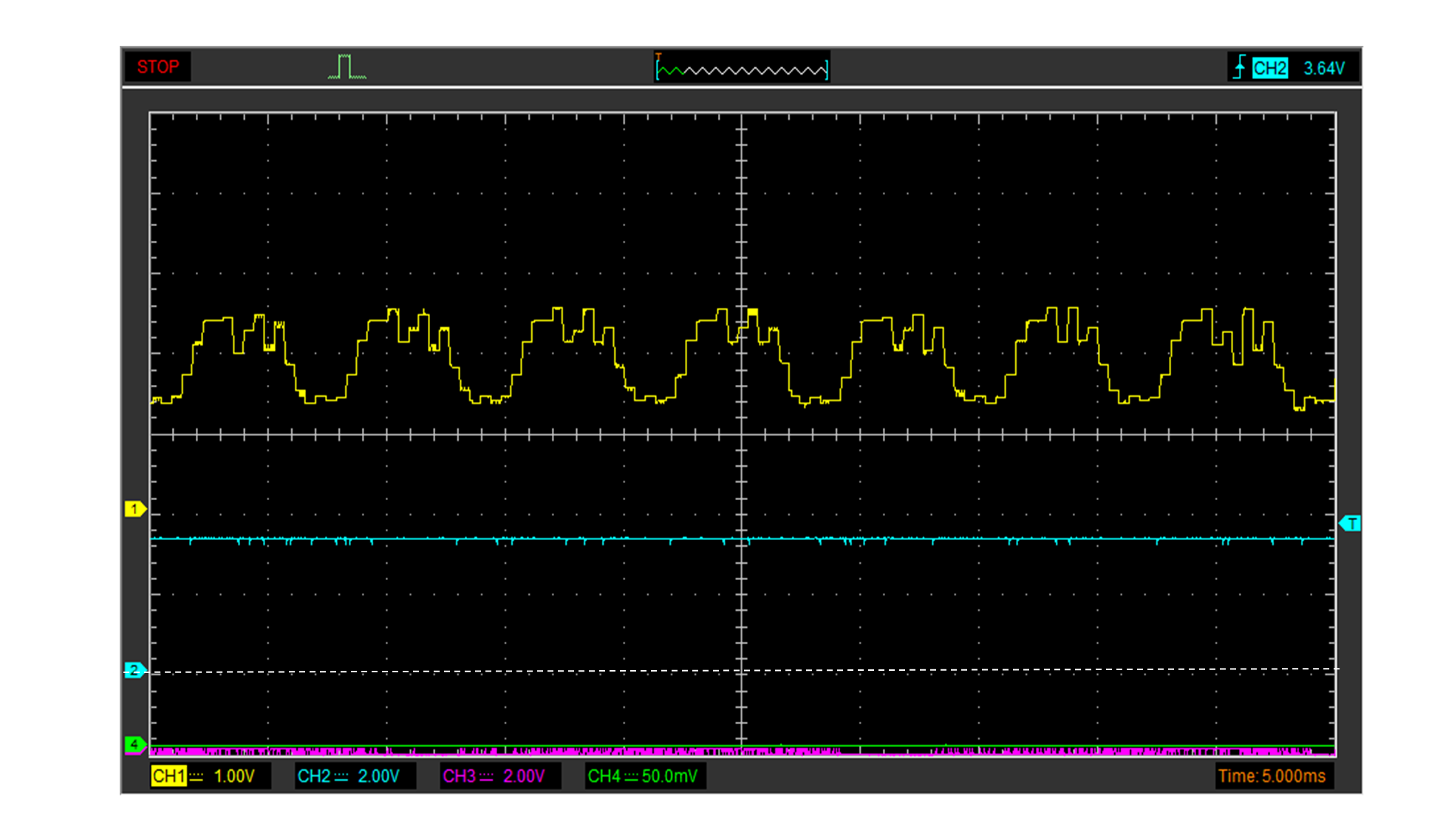
図11 Nucleo_Hall_rect_sin_vectorのSVPWM変調波(1V/div,5ms/div)








ショップへのリンク")